МОДЕЛИРОВАНИЕ ВЫСШЕЙ НЕРВНОЙ ДЕЯТЕЛЬНОСТИ
Доктор физико-математических наук А. ЖДАНОВ, заведующий Отделом имитационных систем Института системного программирования РАН.
Первая часть данной статьи была опубликована в предыдущем номере журнала (см. "Наука и жизнь" № 1, 2000 г.). Мы вынуждены принести извинения за досадное смешение строк в таблице на первой странице статьи, произошедшее из-за чрезмерной интеллектуальности компьютерных систем подготовки текстов. Любознательный читатель, конечно, догадался, что таблица должна иметь следующий вид:
| Кибернетические объекты | Биологические объекты |
| Среда | Окружающая среда |
| Объект управления(ОУ) | Организм |
| Управляющая система(УС) | Нервная система и мозг |
| Датчики | Рецепторы |
| Исполнители | Эффекторы |
Итак, в первой части статьи был описан подход к построению модели нервной системы, вытекающий из исходных представлений о дискретности, автономности, аппаратной приспособленности и минимуме исходных знаний управляющей системы. Конечно, построить подобную систему "автономного адаптивного управления" (ААУ) в полном объеме - задача непростая, поскольку каждая из входящих в нее подсистем должна решать весьма сложную задачу, составляющую в наше время предмет отдельных научных направлений. Напомним, что речь идет о таких задачах, как автоматическая классификация и распознавание, поиск и представление знаний, моделирование эмоций, принятие решений, и некоторых других. Однако даже самые простые по реализации варианты подсистем, решающих такие задачи, объединенные в единое целое - управляющую систему ААУ, дают новый эффект. Коротко опишем некоторые примеры управляющих систем, построенных по принципу ААУ.
Pilot - прототип адаптивной системы управления угловым движением космического аппарата.
Желая найти практическое применение разработанному нами методу "автономного адаптивного управления", мы обратились в НПО им. С. А. Лавочкина, где разрабатываются системы управления для некоторых автоматических космических аппаратов. Специалисты НПО поставили нам задачу: построить систему управления угловым движением (поворотом и стабилизацией в пространстве) автоматического космического аппарата на основе нашего метода. Дело в том, что существующие системы управления дают ограниченную точность ориентации (±0,1 угловой секунды), которой недостаточно для некоторых космических аппаратов. В этих системах управление строится на основе математической модели углового движения космического аппарата. Параметры модели, учитывающие такие факторы, как невесомость, вакуум, резкие перепады температуры, измеряются на наземных испытательных стендах. Естественно, что такие измерения не могут быть точными, поскольку полностью воспроизвести уникальные условия реального космоса невозможно. Кроме того, детерминированная математическая модель не позволяет учесть возможность случайных изменений свойств космического аппарата в ходе полета. Необходима адаптивная схема управления, когда управляющая система автоматически подстраивается к текущим свойствам объекта управления.
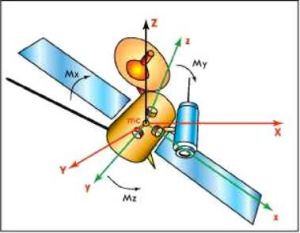
Входной информацией для разрабатываемой управляющей системы служили показания датчиков, измеряющих угол между действительным и заданным положениями космического аппарата, а также скорость его углового движения. Управляющей системе ставилась цель: поддерживать угол и угловую скорость по возможности ближе к нулевым значениям. Выходные (управляющие) воздействия управляющей системы представляли собой команды приводам развить те или иные крутящие моменты, поворачивающие космический аппарат в соответствующем направлении с соответствующей скоростью. Управляющая система должна была адаптироваться к характерным реакциям космического аппарата на управляющие моменты. Именно эти реакции и трудно рассчитать заранее с надлежащей точностью, так как космический аппарат несет на себе упругие нелинейные осцилляторы, которые в условиях космоса ведут себя не совсем так, как в наземных испытаниях.
Построенный нами прототип системы управления Pilot показал, что она действительно успешно адаптируется к свойствам космического аппарата и способна повысить качество управления его угловым движением в несколько раз. Чтобы достичь аналогичного результата традиционными методами, потребовались бы значительно большие затраты времени и сил.
Система Pilot демонстрирует интересные свойства, основное из которых - адаптивность, то есть способность управляющей системы приспосабливаться к свойствам объекта управления и окружающей среды. Этим свойством обладают многие блоки управляющей системы Pilot. В процессе обучения управляющая система совершает по определенному плану пробные управляющие воздействия на объект управления и выясняет его реакции на эти воздействия. Вся информация о происходящем отображается в управляющей системе в виде "образов" - образов углового положения, образов управляющих воздействий, образов эмоциональных оценок состояний. Последние вырабатываются "эмоциональным аппаратом" управляющей системы, подсказывающим, насколько "хорошо" или "плохо" то или иное текущее угловое положение космического аппарата. Если эту эмоциональную оценку выражать не числом, а некоторой мимикой "лица" управляющей системы, то будет весьма любопытно наблюдать за ее "гримасами".
Если управляющая система выясняет, что причинно-следственные связи некоторых образов неслучайны, то она запоминает это в своей базе знаний. Заметим, что такие "знания" управляющая система добывает самостоятельно, в этом проявляется ее автономность. Чем больше знаний о свойствах космического аппарата накопила управляющая система, тем более успешно она может управлять им. Если свойства космического аппарата изменяются, например, аппарат стал легче из-за выработки горючего или изменилась конфигурация аппарата - раскрылись антенны, изменились упругие свойства осцилляторов из-за поломки, появилась утечка газа и аппарат стало разворачивать, - управляющая система, обнаружив ухудшение качества управления, начинает переучиваться, корректирует свои знания, и качество управления вновь повышается. Если на аппарат воздействовать кратковременным возмущением (толкнуть его), управляющая система быстро гасит возмущение.
По мере накопления знаний в базе знаний управляющей системы Pilot (количество цветных точек в верхнем прямоугольнике) растет качество управления космическим аппаратом: графики угла рассогласования (верхний) и угловой скорости (нижний) приближаются к нулю (горизонтальной черте).
Одно свойство управляющей системы для нас оказалось неожиданным. После обучения управляющей системы, при котором на космический аппарат оказывают случайные пробные воздействия, качество управления вначале невысоко, но уже в процессе управления оно постепенно возрастает. Выяснилось, что свойства объекта управления зависят от того, каким способом вы его испытываете: обращаетесь ли с ним бесцеремонно, дергая его во все стороны, "тряся как грушу" в процессе исследования-обучения, или испытываете его осторожно. Это имеет прямую аналогию с жизненными ситуациями: так врач, бережно исследующий пациента, точнее поставит диагноз, нежели обращающийся с пациентом неделикатно. Оказалось также, что из обученной базы знаний можно извлечь самые важные знания и, представив их в удобной форме, передать более простой детерминированной системе управления, которая сможет управлять объектом, но уже без адаптации.
Важно, что с небольшими изменениями система Pilot может быть использована для управления и многими другими объектами: активными подвесками транспортных средств, стабилизаторами блоков питания и других энергетических установок, обрабатывающими станками и так далее.
"Тактик" - прототип системы поддержки принятия решений при управлении социальными объектами.
Метод автономного адаптивного управления может быть использован и для решения социальных задач.
По заказу Центра президентских программ мы исследовали возможность применения нашего метода в системе поддержки принятия решений при управлении социальными объектами. Сначала нас тревожило, возможно ли вообще представлять в цифровой форме состояния социального объекта. Но оказалось, что такая задача вполне решаема.
Следующая проблема возникла в связи с очень медленным поступлением входной информации, что крайне замедляло бы процесс накопления эмпирических знаний. Это натолкнуло нас на идею обучения системы по архивным данным. Эксперименты на архивных данных, описывающих социальные процессы в одном из районов Сибири, показали, что такое обучение возможно и после накопления необходимых знаний управляющая система может в некоторых ситуациях принимать эмпирически обоснованные решения.
Сравнив возможности системы "Тактик" с возможностями обычной нейросети, мы показали, что "Тактик", в отличие от нейросети, не только предсказывает некоторые события, но и предлагает на каждом шаге управляющие воздействия, которые способны улучшить текущую ситуацию.
Конечно, при управлении социальными объектами окончательные решения должны приниматься ответственными лицами. Задача управляющей системы - помочь выявить некоторые закономерности в развитии социальной ситуации, которые могут ускользнуть от взгляда человека.
В настоящее время наша группа работает и над другими системами управления, имеющими как практическое, так и теоретическое значение. Мы надеемся, что свойства созданных прототипов управляющих систем привлекут к ним внимание разработчиков объектов, которым требуется автономное адаптивное управление. Это в свою очередь поможет развивать его теорию и продвигаться по пути создания систем "автономного искусственного интеллекта".
Наши исследования финансировались, в частности, грантами Российского фонда фундаментальных исследований и Министерства науки и технологий РФ.
Читайте в любое время
