Бионической ноге добавили естественности
Чтобы искусственная нога лучше починялась человеку, она должна получать больше импульсов от оставшихся после ампутации мышц.
Когда мы сгибаем ногу или руку, то одни мышцы в них сокращаются, а другие, наоборот, растягиваются. Когда мы разгибаем ногу или руку, то те же мышцы меняются ролями: те, которые растягивались, теперь сокращаются, а те, которые сокращались, растягиваются. При этом информация о состоянии мышц постоянно поступает в мозг, благодаря чему мы чувствуем собственные движения, их скорость и направление. И поэтому мы всегда можем повлиять на работу мышц, когда нам нужно, например, подняться по лестнице или просто по склону. Мы, собственно, даже не задумываемся о том, что и как нам нужно сделать с мышцами, всё происходит на автомате, мозг и нервы всё делают сами с минимальным участием сознания.
Если же вместо обычной ноги с мышцами появляется бионический роботизированный протез, то тут начинаются проблемы. В таком протезе искусственная стопа подвижно крепится с помощью аналога голеностопного сустава, но её движениями управляет преимущественно программа, которая переключает протез между разными режимами ходьбы. Бионическая нога соединяется с телом так, чтобы получать сигналы от живых мышц, но эти сигналы не позволяют сделать походку достаточно плавной и естественной. После ампутации мозг больше не получает сигналов о состоянии мышц – ему их просто неоткуда получить, мышцы если и остались, то в урезанном варианте, и общение между ними почти полностью свелось на нет. Соответственно, в обратную сторону, от мозга к оставшимся мышцам, тоже идёт намного меньше сигналов. Поэтому бионической ноге приходится руководствоваться автономными программами и датчиками давления.
В статье в Nature Medicine сотрудники Массачусетского технологического института описывают способ, который позволяет сделать движения бионической ноги более естественными. В исследовании участвовали четырнадцать человек, у которых нога была ампутирована ниже колена. Семерым из них перед тем, как поставить протез, делали особую операцию: в месте ампутации сохранялись остатки мышц, которые прежде работали на сгибание и разгибание ноги, и эти остатки соединяли так, чтобы они могли снова почувствовать друг друга. Ощущая взаимное напряжение и расслабление, мышечные волокна работали так, как если бы они управляли настоящей ногой. Они начинали генерировать больше нервно-мышечных импульсов, по которым можно понять положение воображаемой ноги в пространстве, скорость ходьбы и т. д. Эти импульсы получала бионическая нога с её бионическим голеностопным суставом (сама бионическая нога, кстати, весила 2,75 кг, что вполне сравнимо с массой обычной «живой» ноги).
Остальным семерым участникам эксперимента такой операции не делали, то есть искусственную конечность к месту ампутации прикрепляли по-старому. И если у тех, кому ногу прикрепляли по-старому, она получала всего 0,7 мышечных импульсов в секунду, то у тех, у кого её прикрепляли по-новому, нога получала целых 10,5 импульсов в секунду. И хотя в обычной ноге мышцы-напарники генерируют около 60 импульсов в секунду, всё равно эти 10,5 импульсов сделали движения намного более естественными. Те, кому ногу прикрепляли по-новому, ходили на 41% быстрее, их протез быстрее приспосабливался к лестницам и к ходьбе по наклонной поверхности. В целом человек получал больше контроля над новой ногой: походка менялась не в зависимости от датчиков давления и предзаданных настроек в ноге, а по воле её обладателя.

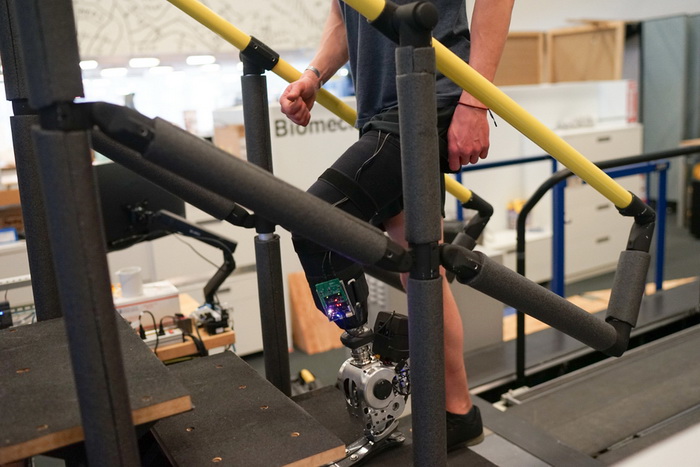
Испытания бионической ноги, которая стала получать больше сигналов от мышц. (Иллюстрация: H. Song et al., Nature Medicine, 2024)
Можно предположить, что такой подход можно использовать лишь в тех случаях, когда ампутация прошла определённым образом и в определённом месте. Впрочем, метод наверняка есть куда совершенствовать. В конце прошлого года мы писали о бионическом протезе руки, с которым возникает та же проблема: ему нужны внятные сигналы от оставшихся после ампутации мышц, а сигналов либо не хватает, либо их трудно интерпретировать. В случае с рукой исследователи вышли из положения, добавив в место ампутации кусочки мышц из бедра пациентки, и эти кусочки стали переводчиками сигналов между нервами и механической рукой.
3 июля 2024
Статьи по теме: